題名:感覚・運動、感情、論理との段階性と生物体としての人の生き方
報告者:ダレナン
感情の発露は行動となり、行動の規定は感情によって産み出される。ヒトは進化の過程で、感情をコントロールし、理性を勝ち取ったと勘違いするも、進化の過程で積み重ねられた生物としての様式は、変化することができない。それゆえに、「人を動かすのは理性でなく、感情である」。そのことを忘れがちになったとしても、その人が行う行動は、おのずと感情に支配されている。
ここで、動物の進化を考えてみると、所謂、ゾウリムシ、アメーバーなどの原生生物には、感情は無論ない(であろう)。しかしながら、感覚に基づいた行動(厳密には明確な目的がないために、運動としたほうがよいが)は、常に認められる。そこに感情などは入り込む余地なない。感情と論理の関係性については、以前に、この記事にて三角形バランスとして体系化したが、原生生物を含めた生物体としてのヒトの進化を、感覚・運動を含めて、感覚・運動、感情、論理との段階性を問うと、
感覚・運動 → 感情 → 論理
の段階で、発達したことは間違いない。感覚・運動が先の三角形バランスのさらに最下層に位置し、生物体であればまず感覚・運動ありきである。ゆえに、人工知能がヒトに近づくぐらいに進化するには、感覚・運動から感情を得るような仕組みが必要となるのかもしれない。ただし、現在は論理ベースの人工知能が中心である。このことから、完全自律型人工生命体としての今後の人工知能を生かすには、MITコンピュータ科学・人工知能研究所の所長であるロドニー・アレン・ブルックス博士1)が提唱するサブサンプション・アーキテクチャ(複雑な知的振る舞いを多数の「単純」な振る舞いモジュールに分割し、振る舞いのモジュールの階層構造を構築する2))が最も理にかなっているであろう。サブサンプション・アーキテクチャを図に示す。これによってシステムの冗長性が増大し、事象は個々に独立して定義される3)。ゾウリムシやアメーバーが感情や論理はなく(ないであろう)とも、環境に対して柔軟に対応できているのは、このシステムがあるからに他ならない。感情や論理は後回しで、まず環境に対応するべく感覚・運動を研ぎ澄ますことが、生物体としての人の生き方としても大事になることを、別の視点からサブサンプション・アーキテクチャも示している。
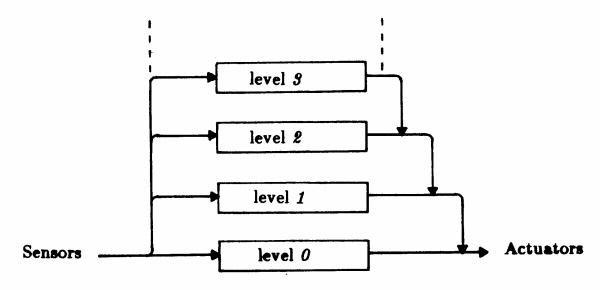
図 サブサンプション・アーキテクチャ2)
1) B, ロドニー: ブルックスの知能ロボット論 なぜMITのロボットは前進し続けるのか?. オーム社. 2006.
2) Brooks, RA: A robust layered control system for a mobile robot. IEEE Journal of Robotics and Automation RA-2-1: 14-23, 1986.
3) 吉田典晃: サブサンプション・アーキテクチャを用いたロボットの制御. 日本ロボット学会誌 11: 1118-1123, 1993.
From ここから。© 2015 This is 地底たる謎の研究室 version。
感覚・運動、感情、論理との段階性と生物体としての人の生き方
「宇宙コロニー( Off-world colonies )での新しい生活が貴方を待っています。チャンスと冒険に満ちた黄金の土地に、再び巡ってきた好運。」 “A new life awaits you in the Off-world colonies. The chance to begin again in a golden land of opportunity and adventure.”
広告



